Antagonistic Muscle based Robot Control for Physical Interactions
In this paper, we examine a novel biologically-inspired control method, emulating antagonistic muscle pairs based on a nonlinear Hill model.
May 26, 2015
IEEE International Conference on Robotics and Automation (ICRA) 2015
Authors
Tapomayukh Bhattacharjee (Disney Research)
Günter Niemeyer (Disney Research)

Antagonistic Muscle based Robot Control for Physical Interactions
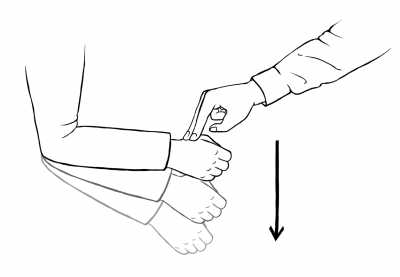
Robots are ever more present in human environments, and effective physical human-robot interactions are essential to many applications. But to a person, these interactions rarely feel biological or equivalent to a human-human interactions. It is our goal to make robots feel more human-like, in the hopes of allowing more natural human-robot interactions. In this paper, we examine a novel biologically-inspired control method, emulating antagonistic muscle pairs based on a nonlinear Hill model. The controller captures the muscle properties and dynamics and is driven solely by muscle activation levels. A human-robot experiment compares this approach to PD and PID controllers with equivalent impedances as well as to direct human-human interactions. The results show the promise of driving motors like muscles and allowing users to experience robots much like humans.