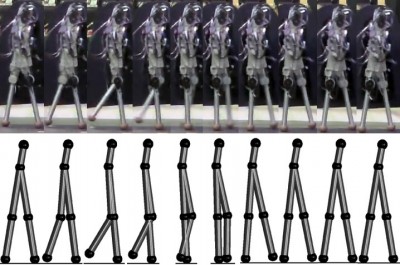
Comparing Foot Placement Strategies for Planar Bipedal Walking
In this paper, we present a quantitative stability comparison of four foot-placement strategies.
June 10, 2013
Dynamic Walking 2013
Authors
Rick Cory (Disney Research)

Comparing Foot Placement Strategies for Planar Bipedal Walking
A number of foot placement strategies for walking have been proposed that make use of widely varying model complexities. Although a number of successful demonstrations have been individually shown in simulation and on physical robots, it is difficult to make a direct performance comparison due to the large differences in hardware, gait generation strategy, control system gains, actuator saturation limits, sensor noise, and many other physical limitations. Here we present a quantitative stability comparison of four foot-placement strategies based on The Inverted Pendulum Model (IPM) [1], Capture Point (CP) [3], Foot Placement Estimator (FPE) [5], and Foot Placement Indicator (FPI) [4]. We implement each of these strategies in simulation and evaluate the Gait Sensitivity Norm (GSN) [2] as a measure of stability during a push disturbance using step duration as a gait indicator. We give a quantitative comparison of these approaches under the same physical simulation. We also discuss our progress in comparative push recovery experiments on our new torque controlled planar bipedal robot with series-elastic actuators.