Concurrent Optimization of Mechanical Design and Locomotion Control of a Legged Robot
This paper introduces a method to simultaneously optimize design and control parameters for legged robots to improve the performance of locomotion based tasks.
July 20, 2014
CLAWAR (Climbing and Walking Robots) 2014
Authors
Krishnamanaswi Digumarti (Disney Research)
Christian Gehring (Disney Research)
Stelian Coros (Disney Research)
Je Min Hwangbo (ETH Zurich)
Roland Siegwart (ETH Zurich)

Concurrent Optimization of Mechanical Design and Locomotion Control of a Legged Robot
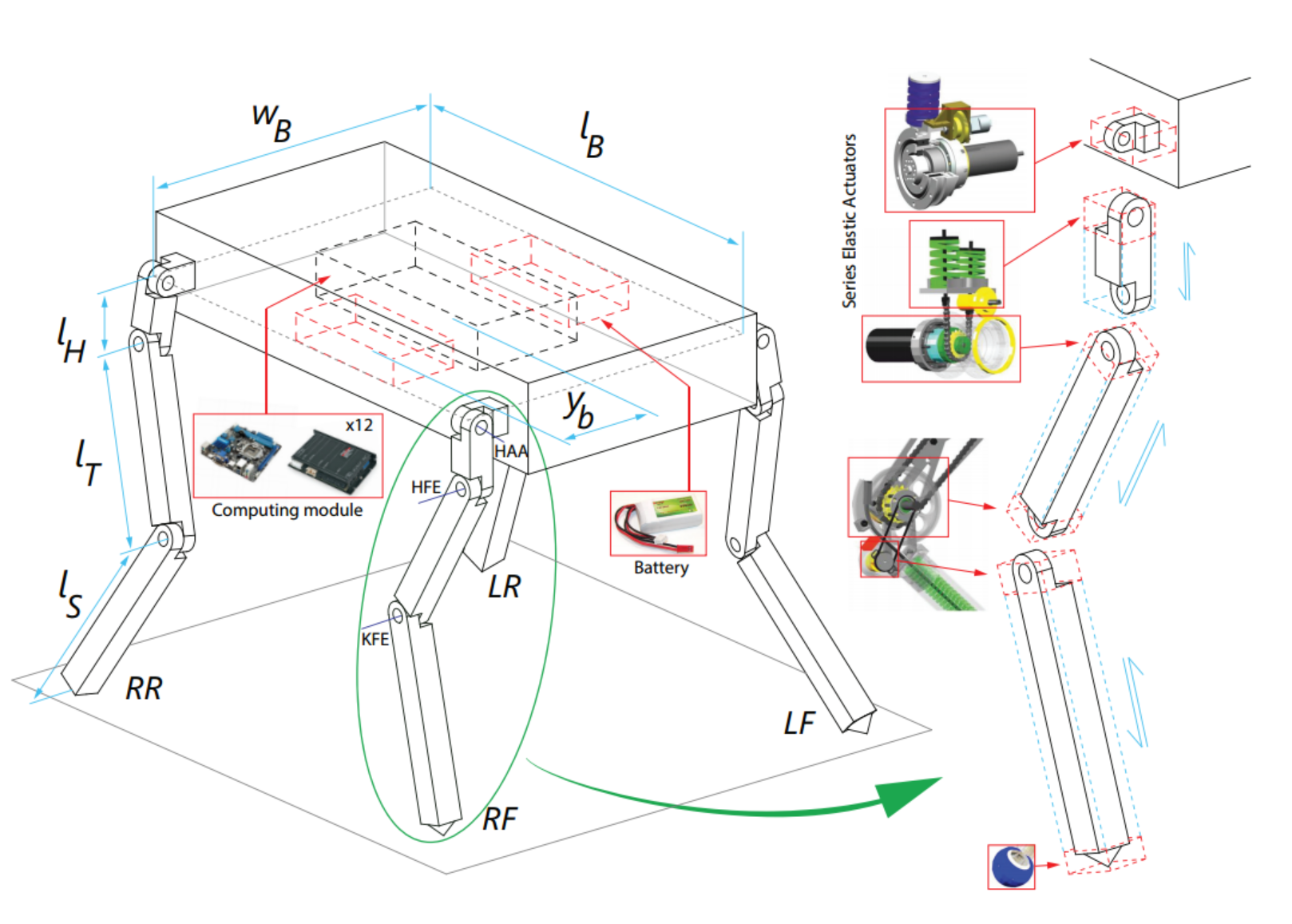
The morphology of a quadrupedal robot was optimized for a trotting and bounding gait to achieve a certain speed while tuning the control parameters of a robust locomotion controller at the same time. The results of the optimization show that a change of the structure of the robot can help increase its admissable top speed while using the same actuation units.
The documents contained in these directories are included by the contributing authors as a means to ensure timely dissemination of scholarly and technical work on a non-commercial basis. Copyright and all rights therein are maintained by the authors or by other copyright holders, notwithstanding that they have offered their works here electronically. It is understood that all persons copying this information will adhere to the terms and constraints invoked by each author’s copyright. These works may not be reposted without the explicit permission of the copyright holder.