Maintaining Awareness of the Focus of Attention of a Conversation: A Robot-Centric Reinforcement Learning Approach
We explore online reinforcement learning techniques to find good policies to control the orientation of a mobile robot during social group conversations.
August 26, 2016
International Symposium on Robot and Human Interactive Communication (RO-MAN) (2016)
Authors
Marynel V´azquez (Carnegie Mellon University)
Aaron Steinfeld (Carnegie Mellon University)
Scott E. Hudson (DisneyResearch|Studios/Carnegie Mellon University)

Maintaining Awareness of the Focus of Attention of a Conversation: A Robot-Centric Reinforcement Learning Approach
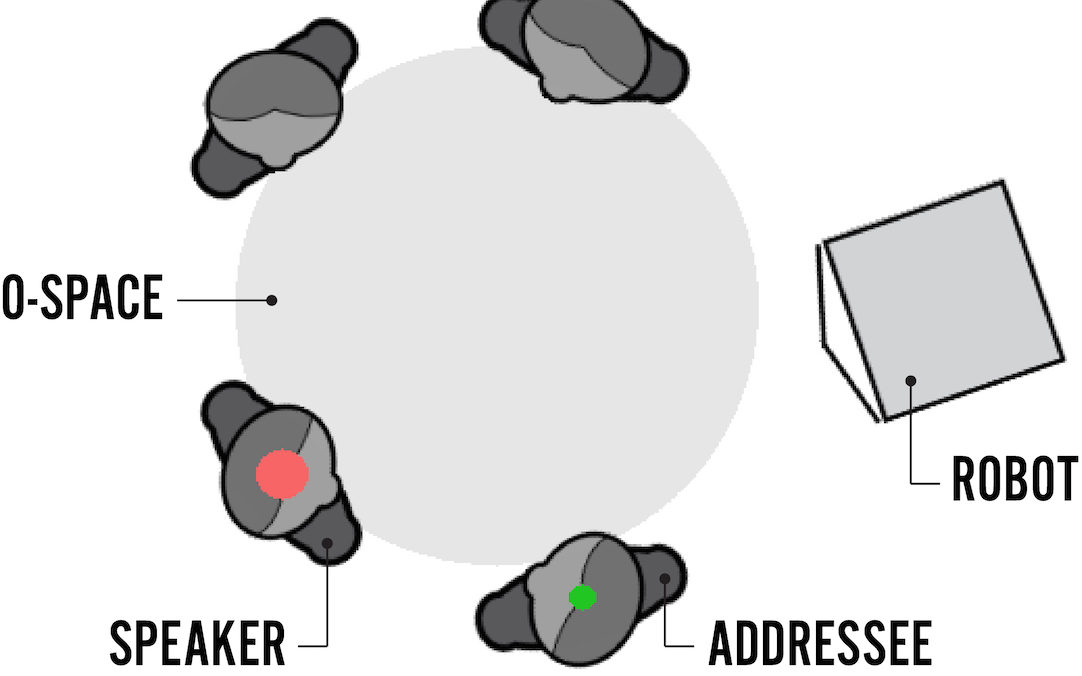
We explore online reinforcement learning techniques to find good policies to control the orientation of a mobile robot during social group conversations. In this scenario, we assume that the correct behavior for the robot should convey attentiveness to the focus of attention of the conversation. Thus, the robot should turn towards the speaker. Our results from tests in a simulated environment show that a new state representation that we designed for this problem can be used to find good policies for the robot. These policies can generalize across interactions with different numbers of people and can handle various levels of sensing noise.