Real-time Physics-based Motion Capture with Sparse Sensors
We propose a framework for motion capture using sparse multi-modal sensor sets, including data obtained from optical markers and inertial measurement units.
December 12, 2016
Conference for Visual Media Production (CVMP) 2016
Authors
Sheldon Andrews (Disney Research)
Ivan Huerta (Disney Research)
Taku Komura (University of Edinburgh)
Leonid Sigal (Disney Research)
Kenny Mitchell (Disney Research)

Real-time Physics-based Motion Capture with Sparse Sensors
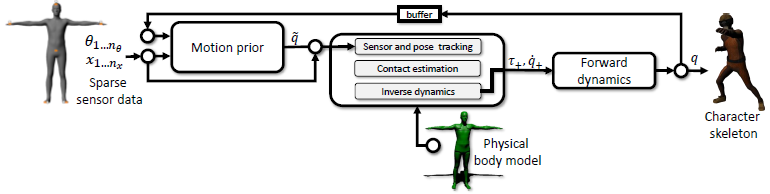
A small number of sensors leaves the performer unencumbered by not requiring dense coverage of the body. An inverse dynamics solver and physics based body model are used, ensuring physical plausibility by computing joint torques and contact forces. A prior model is also used to give an improved estimate of motion of internal joints. The behaviour of our tracker is evaluated using several black box motion priors. We show that our system can track and simulate a wide range of dynamic movements including bipedal gait, ballistic movements such as jumping, and interaction with the environment. The reconstructed motion has low error and appears natural. As both the internal forces and contacts can be obtained with high credibility, our system is also useful for human movement analysis.