Robust Geometric Self-Calibration of Generic Multi-Projector Camera Systems
We evaluated the proposed methods using more than ten multi-projection datasets ranging from a toy castle set up consisting of three cameras and one projector up to a half dome display system with more than 30 devices.
October 9, 2017
IEEE International Symposium on Mixed and Augmented Reality (ISMAR) 2017
Authors
Simon Willi (Disney Research)
Anselm Grundhöfer (Disney Research)

Robust Geometric Self-Calibration of Generic Multi-Projector Camera Systems
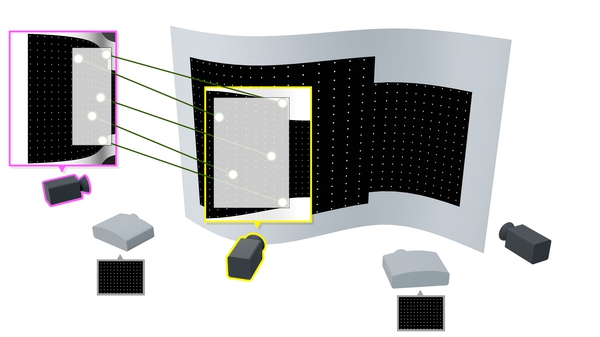
Calibration of multi-projector-camera systems (MPCS) is a cumbersome and time-consuming process. It is of great importance to have robust, fast and accurate calibration procedures at hand for a wide variety of practical applications. We propose a fully automated self-calibration method for arbitrarily complex MPCS. It enables reliable and accurate intrinsic and extrinsic calibration without any human parameter tuning. We evaluated the proposed methods using more than ten multi-projection datasets ranging from a toy castle set up consisting of three cameras and one projector up to a half dome display system with more than 30 devices. Comparisons to reference calibrations, which were generated using the standard checkerboard calibration approach [44], show the reliability of our proposed pipeline, while a ground truth evaluation also shows that the resulting reconstructed point cloud accurately matches the shape of the reference geometry. Besides being fully automatic without the necessity of parameter fine-tuning, the proposed method also significantly reduces the installation time of MPCS compared to checkerboard-based methods and makes it more suitable for real-world applications.