Multi-Robot System for Artistic Pattern Formation
This paper describes work on multi-robot pattern formation. Arbitrary target patterns are represented with an optimal robot deployment, using a method that is independent of the number of robots. Furthermore, the trajectories are visually appealing in the sense of being smooth, oscillation free, and showing fast convergence.
May 9, 2011
IEEE International Conference on Robotics and Automation (ICRA) 2011
Authors
Javier Alonso-Mora (Disney Research/ETH Joint PhD)
Andreas Breitenmoser (ETH Zurich)
Martin Rufli (ETH Zurich)
Roland Siegwart (ETH Zurich)
Paul Beardsley (Disney Research)

Multi-Robot System for Artistic Pattern Formation
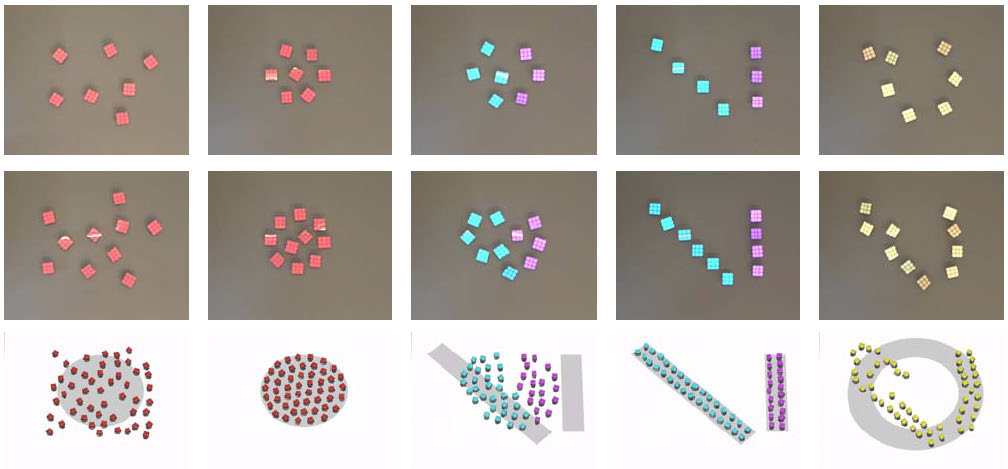
This paper describes work on multi-robot pattern formation. Arbitrary target patterns are represented with an optimal robot deployment, using a method that is independent of the number of robots. Furthermore, the trajectories are visually appealing in the sense of being smooth, oscillation free, and showing fast convergence. A distributed controller guarantees collision free trajectories while taking into account the kinematics of differentially driven robots. Experimental results are provided for a representative set of patterns, for a swarm of up to ten physical robots, and for fifty virtual robots in simulation.