Reciprocal Collision Avoidance for Multiple Car-like Robots
In this paper, a method for distributed reciprocal collision avoidance among multiple non-holonomic robots with bike kinematics is presented.
May 14, 2012
IEEE International Conference on Robotics and Automation (ICRA) 2012
Authors
Javier Alonso-Mora (Disney Research/ETH Joint PhD)
Andreas Breitenmoser (ETH Zurich)
Paul Beardsley (Disney Research)
Roland Siegwart (ETH Zurich)

Reciprocal Collision Avoidance for Multiple Car-like Robots
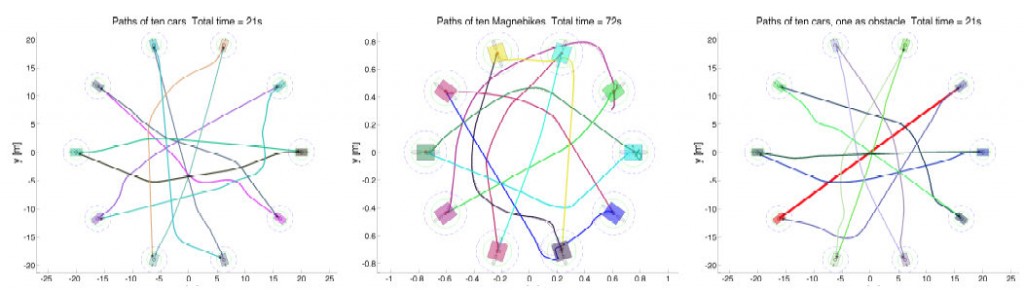
The In this paper a method for distributed reciprocal collision avoidance among multiple non-holonomic robots with bike kinematics is presented. The proposed algorithm, bicycle reciprocal collision avoidance (B-ORCA), builds on the concept of optimal reciprocal collision avoidance (ORCA) for holonomic robots but furthermore guarantees collision-free motions under the kinematic constraints of car-like vehicles. The underlying principle of the B-ORCA algorithm applies more generally to other kinematic models, as it combines velocity obstacles with generic tracking control. The theoretical results on collision avoidance are validated by several simulation experiments between multiple car-like robots