Object and Animation Display with Multiple Aerial Vehicles
This paper presents a fully automated method to display objects and animations in 3D with a group of aerial vehicles.
October 7, 2012
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2012
Authors
Javier Alonso-Mora (Disney Research/ETH Joint PhD)
Marcel Schoch (Disney Research/ETH Joint M.Sc.)
Andreas Breitenmoser (ETH Zurich)
Roland Siegwart (ETH Zurich)
Paul Beardsley (Disney Research)

Object and Animation Display with Multiple Aerial Vehicles
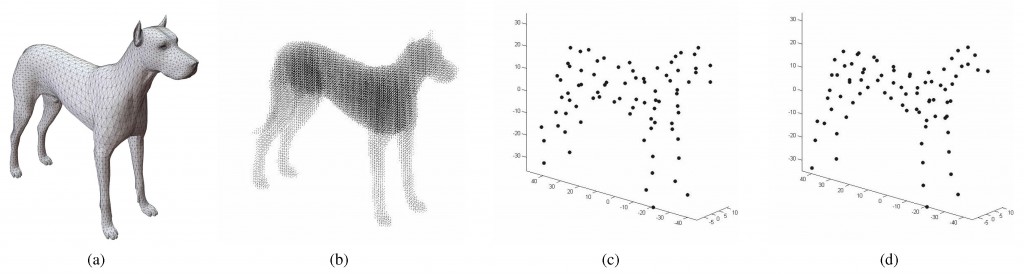
The system input is a single object or an animation (sequence of objects) created by an artist. The first stage is to generate physical goal configurations and robot colors to represent the objects with the available number of robots. The run-time system includes algorithms for goal assignment, path planning and local reciprocal collision avoidance that guarantee smooth, fast and oscillation-free motion. The presented algorithms are tested in simulations and verified with real quadrotor helicopters and scale to large robot swarms.