Contact Pressure Distribution as an Evaluation Metric for Human-Robot Hand Interactions
We propose that the contact pressure distribution of the grasp should be used as a hand benchmark both for naturalness and comfort, and present our initial work in this direction.
March 7, 2017
HRI 2017 workshop – Towards reproducible HRI experiments: scientific endeavors, benchmarking and standardization 2017
Authors
Espen Knoop (Disney Research)
Moritz Baecher (Disney Research)
Paul Beardsley (Disney Research)

Contact Pressure Distribution as an Evaluation Metric for Human-Robot Hand Interactions
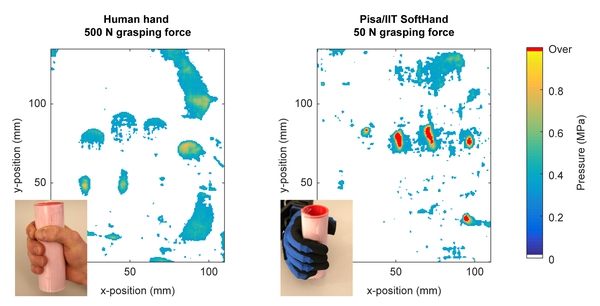
Soft robotic technologies are paving way for physical human-robot hand interactions, creating a need for structured evaluation metrics for robot hands. We propose that the contact pressure distribution of the grasp should be used as a hand benchmark both for naturalness and comfort, and present our initial work in this direction. We describe an experimental setup for measuring the contact pressure distribution and present a case study comparing the pressure distributions from a robotic hand and a human hand. The grasping force of the human hand is ten times greater than the robot, but the robot hand produces higher peak contact pressures and smaller contact areas.