A Computational Design Tool for Compliant Mechanisms
We present a computational tool for designing compliant mechanisms.
July 20, 2017
ACM SIGGRAPH 2017
Authors
Vittorio Megaro (Disney Research/ETH Joint PhD)
Jonas Zehnder (Disney Research)
Moritz Baecher (Disney Research)
Stelian Coros (Carnegie Mellon University)
Markus Gross (Disney Research/ETH Zurich)
Bernhard Thomaszewski (Disney Research)

A Computational Design Tool for Compliant Mechanisms
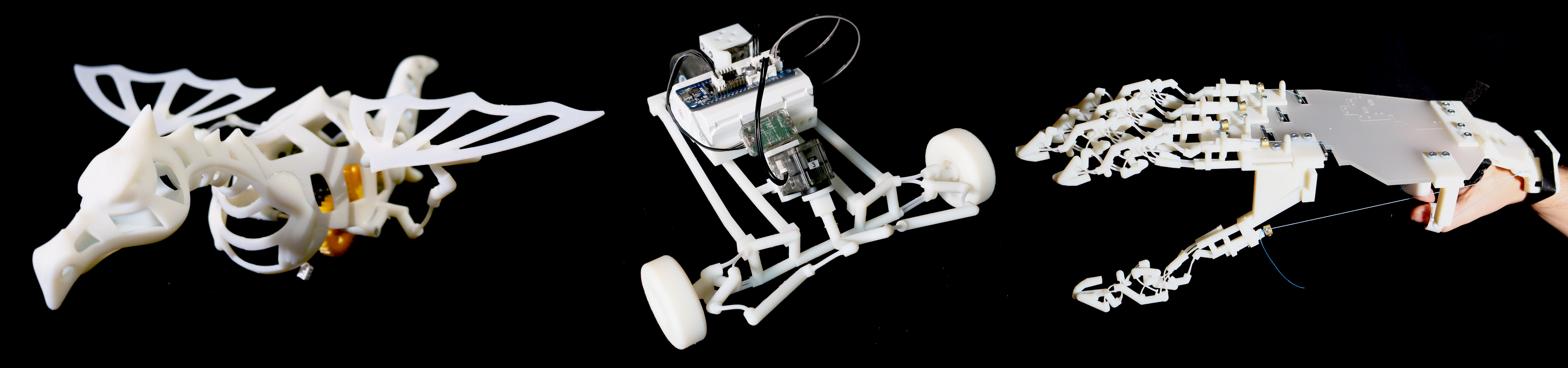
Our method takes as input a conventional, rigidly-articulated mechanism defining the topology of the compliant design. This input can be both planar or spatial, and we support a number of common joint types which, whenever possible, are automatically replaced with parameterized flexures. As the technical core of our approach, we describe a number of objectives that shape the design space in a meaningful way, including trajectory matching, collision avoidance, lateral stability, resilience to failure, and minimizing motor torque. Optimal designs in this space are obtained as solutions to an equilibrium-constrained minimization problem that we solve using a variant of sensitivity analysis. We demonstrate our method on a set of examples that range from simple four-bar linkages to full-fledged animatronics, and verify the feasibility of our designs by manufacturing physical prototypes.