Validation of the Robot Social Attributes Scale (RoSAS) for Human-Robot Interaction through a Human-to-Robot Handover Use Case
This work aims to validate the Robotic Social Attributes Scale (RoSAS) for human-robot interaction.
September 24, 2017
IROS 2017 Workshop on Human-Robot Interaction in Collaborative Manufacturing Environments
Authors
Matt Pan (Disney Research)
Elizabeth Croft (University of British Columbia, Canada)
Gunter Niemeyer (Disney Research)

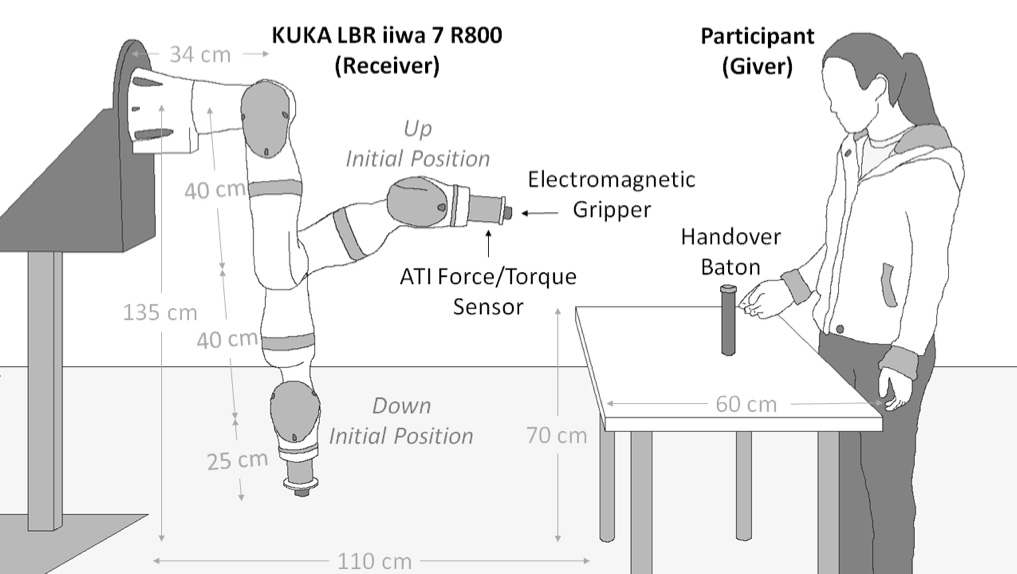
The RoSAS evaluates the social perception of robots. It measures an inventory of 18 items that are collected into three robot attributes: competence, warmth, and discomfort. We apply RoSAS to a human-to-robot handover and confirm the internal consistency and unidimensionality of each attribute. This validates the scale in this use case and suggests a more general applicability to other physical human-robot interactions including collaborative manipulation or turn-taking tasks.
The documents contained in these directories are included by the contributing authors as a means to ensure timely dissemination of scholarly and technical work on a non-commercial basis. Copyright and all rights therein are maintained by the authors or by other copyright holders, notwithstanding that they have offered their works here electronically. It is understood that all persons copying this information will adhere to the terms and constraints invoked by each author’s copyright. These works may not be reposted without the explicit permission of the copyright holder.