Trajectory Augmentation for Robust Neural Locomotion Controllers
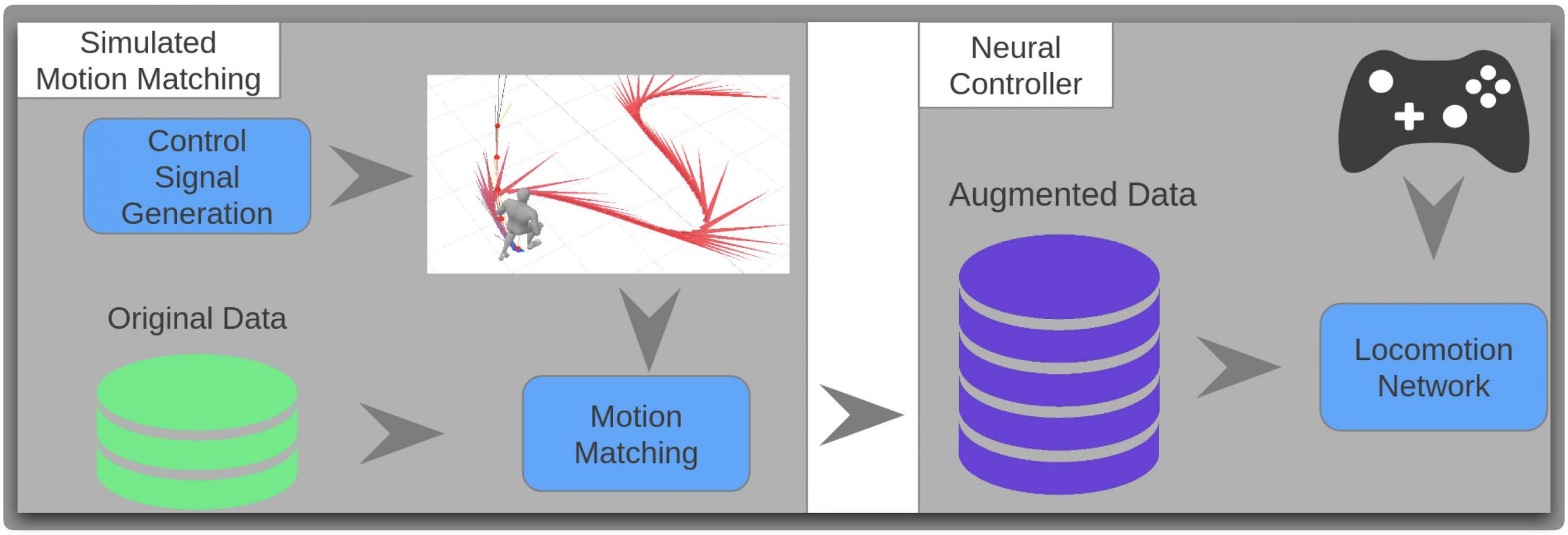
In this work, we introduce Trajectory Augmentation (TrajAug), a fully automatic data augmentation technique that generates synthetic motion data by using motion matching to stitch sequences from the original dataset to follow random trajectories. By uniformly sampling these trajectories, we can rebalance the dataset and introduce sharper turns that are commonly used in-game but are hard to capture.
February 27, 2024
VISIGRAPP 2024
Authors
Dhruv Agrawal (DisneyResearch|Studios/ETH Joint PhD)
Jakcob Buhmann (DisneyResearch|Studios)
Mathias Koing (DisneyResearch|Studios/ETH Joint PhD)
Robert W. Sumner (DisneyResearch|Studios/ETH Zurich)
Martin Guay (DisneyResearch|Studios)

Trajectory Augmentation for Robust Neural Locomotion Controllers
Neural Locomotion Controllers are promising real-time character controllers that can learn directly from motion data. However, the current state of the art models suffer from artifacts such as Pose Blocking and Foot Skating caused by poor generalization to real world control signals. We show that this is due to training on unbalanced biased datasets with poor representation for many important gaits and transitions. To solve this poor data problem, we introduce Trajectory Augmentation (TrajAug), a fully automatic data augmentation technique that generates synthetic motion data by using motion matching to stitch sequences from the original dataset to follow random trajectories. By uniformly sampling these trajectories, we can rebalance the dataset and introduce sharper turns that are commonly used in-game but are hard to capture. TrajAug can be easily integrated into the training of existing neural locomotion controllers without the need for adaptation. We show that TrajAug produces better results than training on only the original dataset or a manually augmented dataset.