Exploration of Geometry and Forces Occurring Within Human-to-Robot Handovers
This work presents an exploratory user study of human-to-robot handovers. In particular, it examines how changes in a robot behavior influence human participation and the overall interaction.
March 25, 2018
IEEE Haptics Symposium 2018
Authors
Matthew K.X.J. Pan (University of British Columbia)
Elizabeth Croft (University of British Columbia, Canada)
Gunter Niemeyer (Disney Research)

Exploration of Geometry and Forces Occurring Within Human-to-Robot Handovers
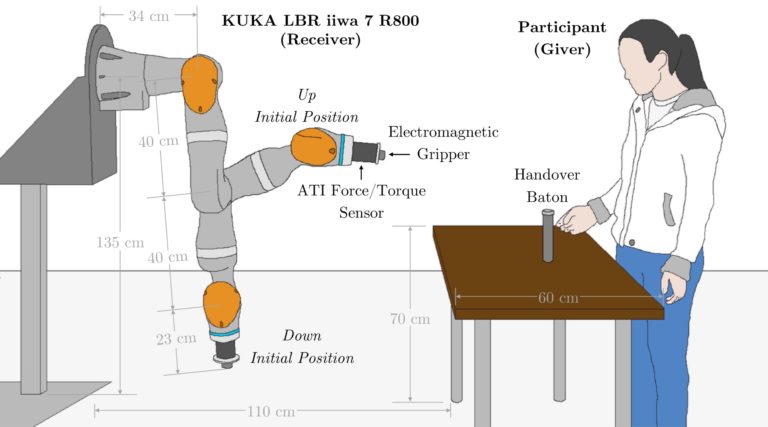
This work presents an exploratory user study of human-to-robot handovers. In particular, it examines how changes in a robot behavior influence human participation and the overall interaction. With a 2x2x2 experimental design, we vary three basic factors and observe both the interaction position and forces. We find the robot’s initial pose can inform the giver about the upcoming handover geometry and impact fluency and efficiency. Also, we find variations in grasp method and retraction speed induce significantly different interaction forces. This effect may occur by changing the giver’s perception of object safety and hence their release timing. Alternatively, it may stem from unnatural or mismatched robot movements. We determine that making the robot predictable is important: we observe a learning effect with forces declining over repeated trials. Simultaneously, the participants’ self-reported discomfort with the robot decreases and perception of emotional warmth increases. Thus, we posit users are learning to predict the robot, becoming more familiar with its behaviors, and perhaps becoming more trusting of the robot’s ability to safely receive the object. We find these results exciting as we believe a robot can become a trusted partner in collaborative tasks.