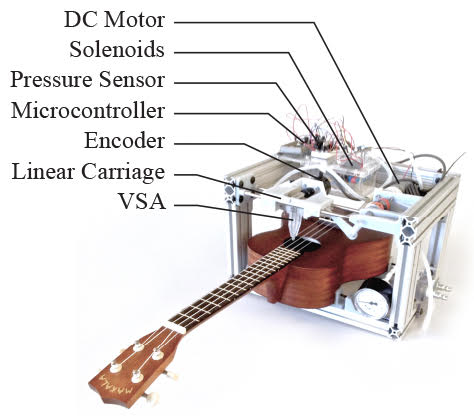
Mechanical Implementation of a Variable-Stiffness Actuator for a Softly Strummed Ukulele
This research illustrates the design, implementation, and evaluation of pneumatic variable-stiffness actuator (VSA) used to strum a four-stringed ukulele with audio variability.
October 11, 2016
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2016
Authors
Austin B. Lawrence (Disney Research)
Alex N. Alspach (Disney Research)
Darrin C. Bentivegna (Disney Research)

Mechanical Implementation of a Variable-Stiffness Actuator for a Softly Strummed Ukulele
A guitar pick is antagonistically loaded with two inflatable polydimethylsiloxane (PDMS) actuators, allowing for the independent control of both position or stiffness through the utilization of one and two PDMS solenoids, respectively. To generate smooth analog pressure signals, the bellows incorporate a controlled leak to atmospheric pressure, having synonymous properties to a lowpass filter circuit when fed a coarse pressure signal through PWM control. Experimental results illustrate a minimum to maximum stiffness range of 76 to 320 Nmm/rad, a maximum cyclical speeds of 2.04 Hz, and a stiffness change rate of 96 Nmm/rad/kPa. Additional to the VSA, alternative PDMS fabrication methods are presented to allow for complex, precise manufacturing of silicone bodies in a low-cost manner.