Tree Cavity Inspection Using Aerial Robots
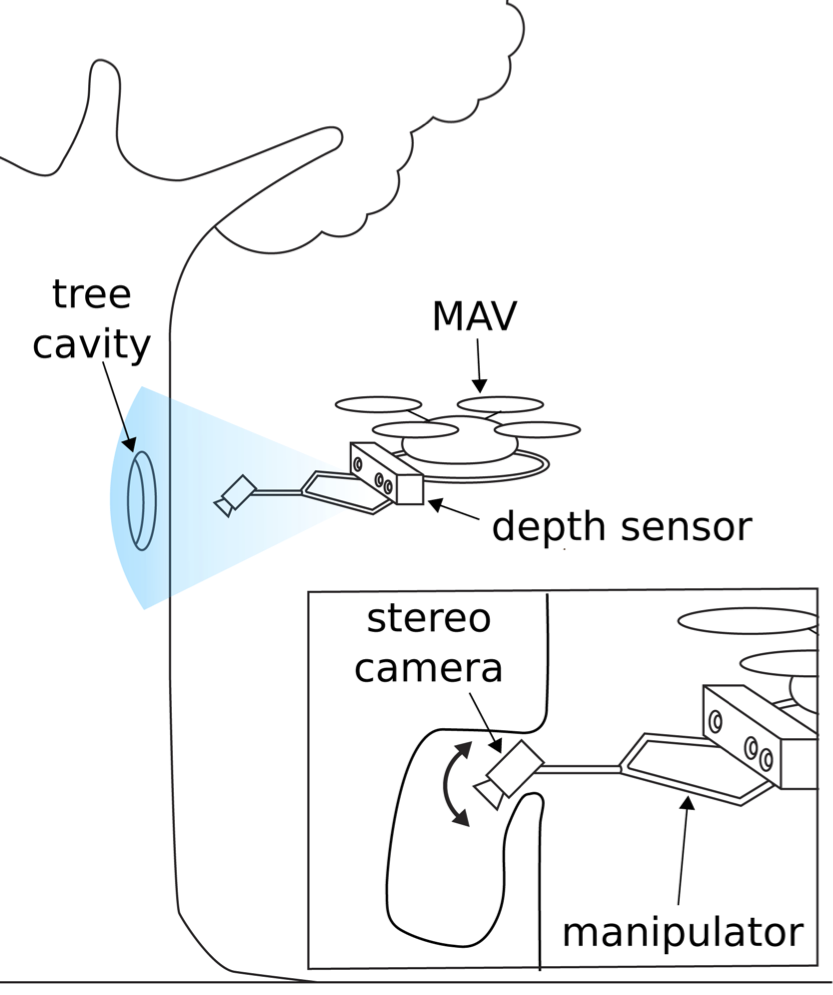
We present an aerial robotic platform for remote tree cavity inspection, based on a hexacopter Micro-Aerial vehicle (MAV) equipped with a dexterous manipulator.
October 11, 2016
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2016
Authors
Kelly Steich (Disney Research Zurich/ETH Zurich)
Mina Kamel (ETH Zurich)
Paul Beardsley (Disney Research)
Martin K. Obrist (Swiss Federal Institute for Forest, Snow and Landscape Research WSL)
Roland Siegwart (ETH Zurich)
Thibault Lachat (Swiss Federal Institute for Forest, Snow and Landscape Research WSL)

Tree Cavity Inspection Using Aerial Robots
The goal is to make the inspection process safer and more efficient and facilitate data collection about tree cavities, which are important for the conservation of biodiversity in forest ecosystems. This work focuses on two key enabling technologies, namely a vision-based cavity detection system and strategies for high level control of the MAV and manipulator. The results of both simulation and real-world experiments are discussed at the end of the paper and demonstrate the effectiveness of our approach.