Evaluating Social Perception of Human-to-Robot
This work explores social perceptions of robots within the domain of human-to-robot handovers.
March 5, 2018
Human Robot Interaction (HRI) 2018
Authors
Matthew K.X.J. Pan (University of British Columbia)
Elizabeth Croft (University of British Columbia, Canada)
Gunter Niemeyer (Disney Research)

Evaluating Social Perception of Human-to-Robot Handovers using the Robot Social Attributes Scale (RoSAS)
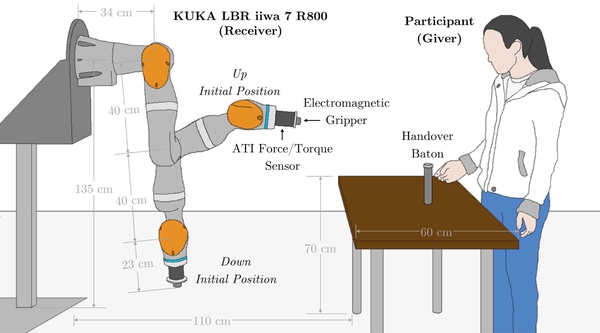
This work explores social perceptions of robots within the domain of human-to-robot handovers. Using the Robotic Social Attributes Scale (RoSAS), we explore how users socially judge robot receivers as three factors are varied: initial position of the robot arm prior to handover, grasp method employed by the robot when receiving a handover object trading off perceived object safety for time efficiency, and retraction speed of the arm following handover. Our results show that over multiple handover interactions with the robot, users gradually perceive the robot receiver as being less discomforting and having more emotional warmth. Additionally, we have found that by varying grasp method and retraction speed, users may hold significantly different judgments of robot competence and discomfort. With these results, we recognize empirically that users are able to develop social perceptions of robots which can change through modification of robot receiving behaviour and through repeated interaction with the robot. More widely, this work suggests that measurement of user social perceptions should play a larger role in the design and evaluation of human-robot interactions and that the RoSAS can serve as a standardized tool in this regard.