Computational Co-Optimization of Design Parameters and Motion Trajectories for Robotic Systems
We present a novel computational approach to optimizing the morphological design of robots.
June 5, 2018
International Journal of Robotics Research 2018
Authors
Sehoon Ha (Disney Research)
Stelian Coros (ETH Zurich)
Alex Alspach (Toyota Research Institute)
Joohyung Kim (Disney Research)
Katsu Yamane (Disney Research)

Computational Co-Optimization of Design Parameters and Motion Trajectories for Robotic Systems
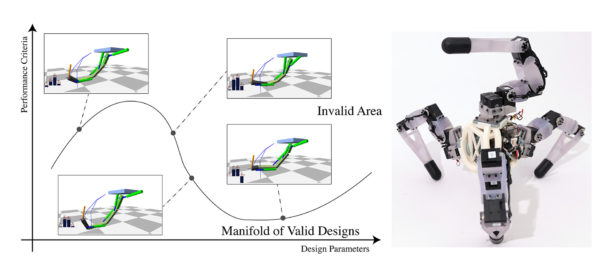
We present a novel computational approach to optimizing the morphological design of robots. Our framework takes as input a parameterized robot design as well as a motion plan consisting of trajectories for end-effectors and, optionally, for its body. The algorithm optimizes the design parameters including link lengths and actuator placements whereas concurrently adjusting motion parameters such as joint trajectories, actuator inputs, and contact forces. Our key insight is that the complex relationship between design and motion parameters can be established via sensitivity analysis if the robots movements are modeled as spatiotemporal solutions to an optimal control problem. This relationship between form and function allows us to automatically optimize the robot design based on specifications expressed as a function of actuator forces or trajectories. We evaluate our model by computationally optimizing four simulated robots that employ linear actuators, four-bar linkages, or rotary servos. We further validate our framework by optimizing the design of two small quadruped robots and testing their performances using hardware implementations.