by Sarah Frigg | May 16, 2016 | Robotics
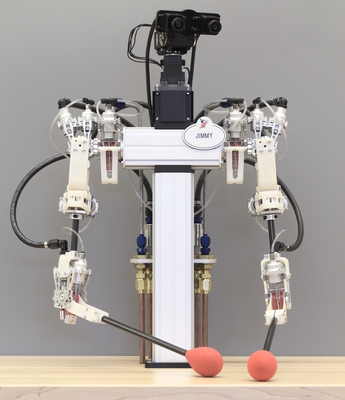
A Hybrid Hydrostatic Transmission and Human-Safe Haptic Telepresence Robot We present a new type of hydrostatic transmission that uses a hybrid air-water configuration. May 16, 2016IEEE International Conference on Robotics and Automation (ICRA) 2016 Authors...
by Sarah Frigg | May 7, 2016 | Digital Fabrication, Uncategorized, Visual Computing
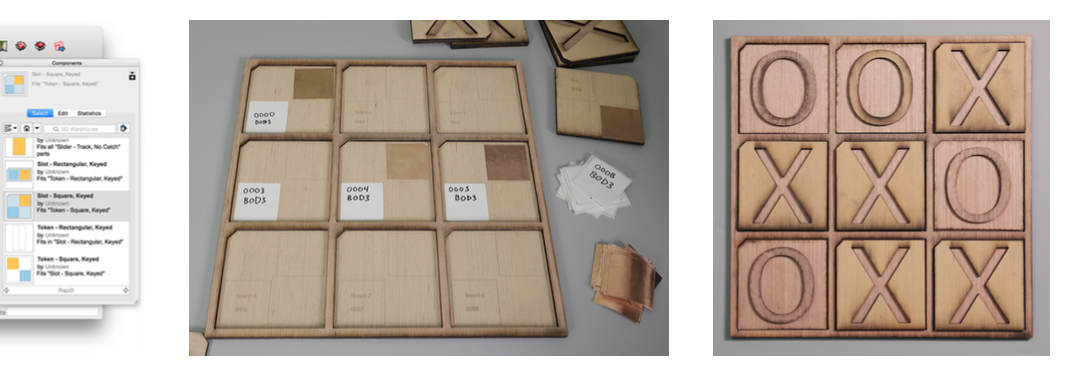
RapID: A Framework for Fabricating Low-Latency Interactive Objects with RFID Tags In this work, we show how to achieve low-latency manipulation and movement sensing with off-the-shelf RFID tags and readers. May 7, 2016CHI Interactivity 2016 Authors Andrew...

by Sarah Frigg | May 7, 2016 | Uncategorized
PaperID: A Technique for Drawing Functional Battery-Free Wireless Interfaces on Paper We describe techniques that allow inexpensive, ultra-thin, battery-free Radio Frequency Identification RFID tags to be turned into simple paper input devices. May 7, 2016CHI...

by Sarah Frigg | May 3, 2016 | Uncategorized
EM-ID: Tag-less Identification of Electrical Devices via Electromagnetic Emissions We present a low cost method for extracting the EM-ID from a device along with a new classification and ranking algorithm that is capable of identifying minute differences in the EM...
by Sarah Frigg | May 3, 2016 | Uncategorized
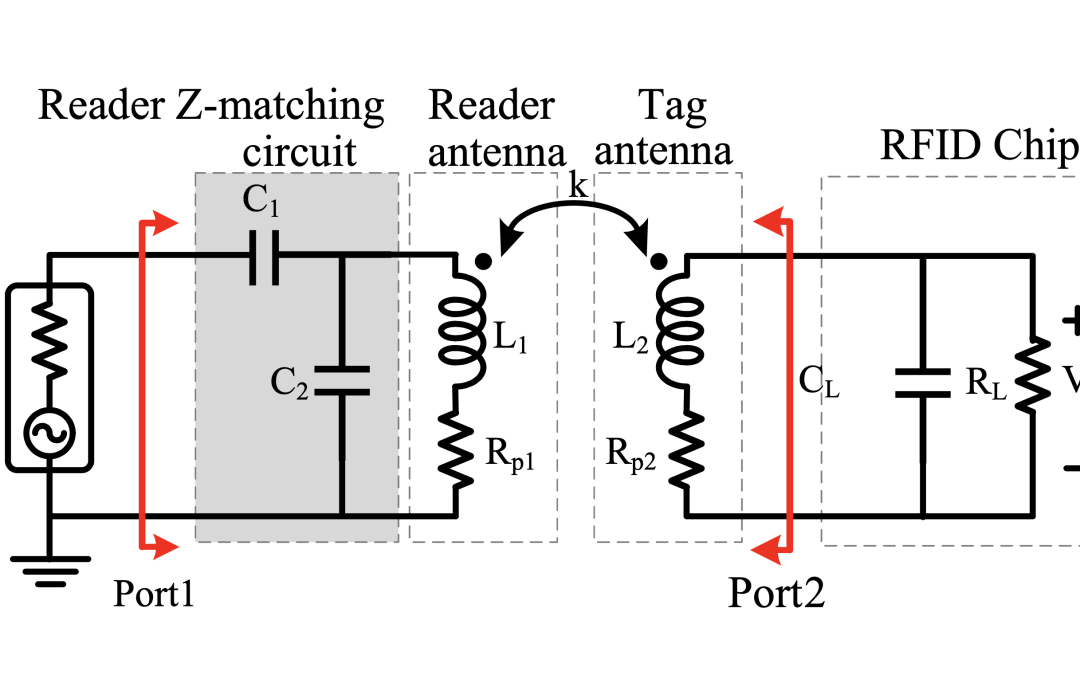
High-Q and Over-Coupled Tuning for Near-Field RFID Systems This work will show both theoretically and through experimentation that using high Q coils in the over-coupled regime supports extension of read range in near field RFID systems by 81% or more compared to...