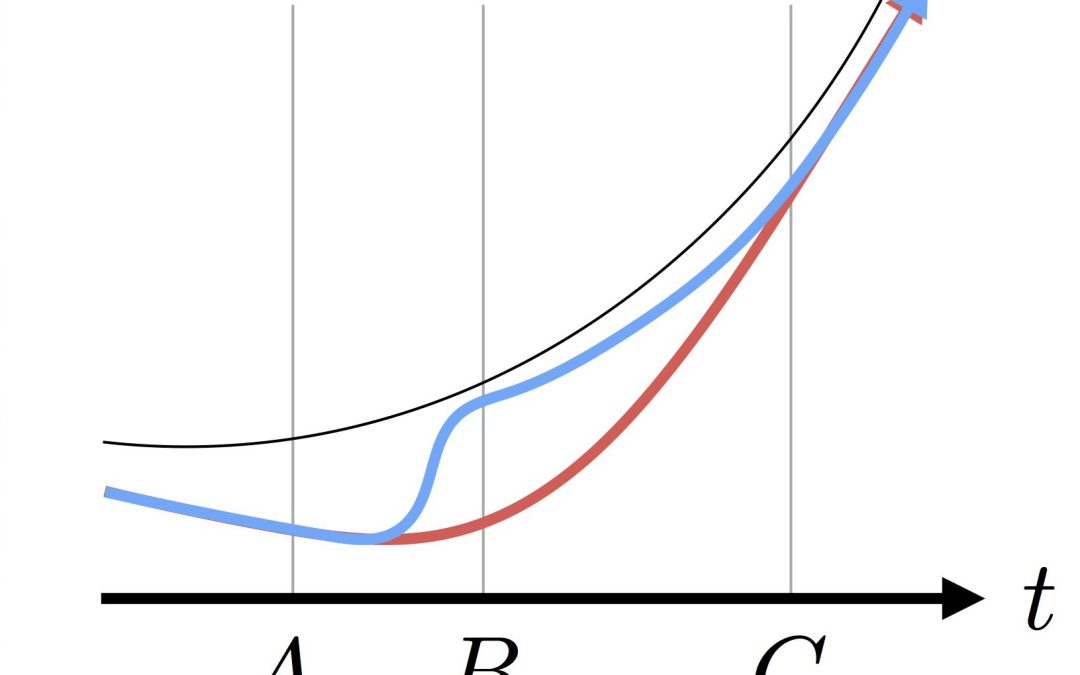
by Sarah Frigg | Jun 19, 2016 | Machine Learning, Visual Computing
Smooth Imitation Learning for Online Sequence Prediction We present an online learning meta-algorithm that achieves fast and stable convergence to a good policy. June 19, 2016International Conference on Machine Learning (ICML) 2016 Authors Hoang M. Le...
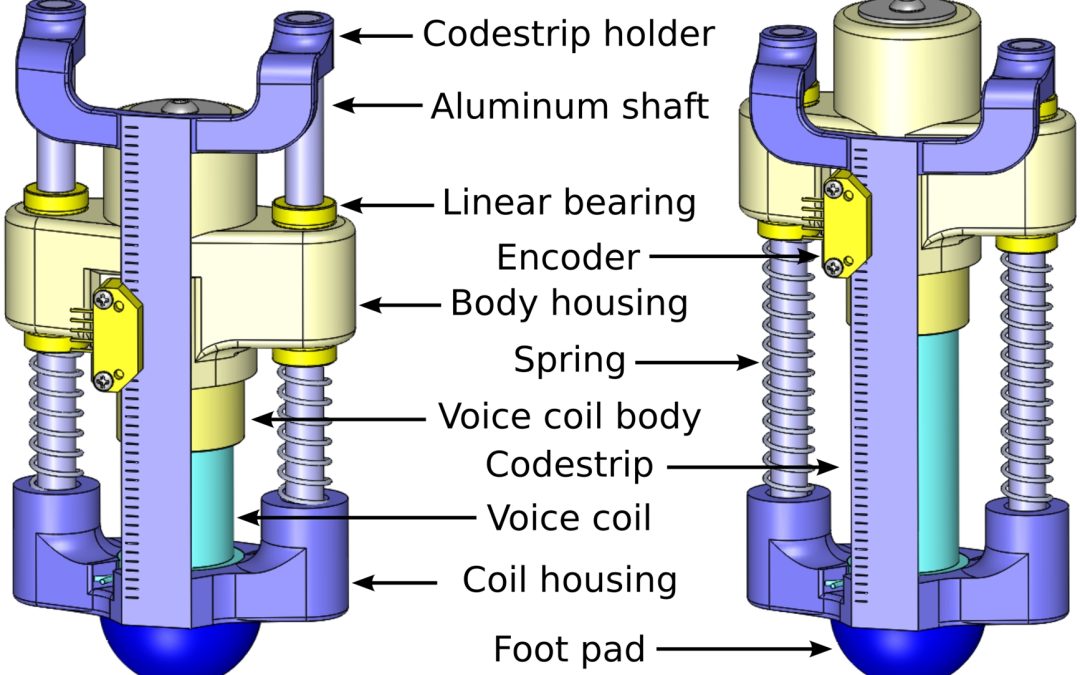
by Sarah Frigg | May 16, 2016 | Robotics
Design of a Hopping Mechanism Using a Voice Coil: Linear Elastic Actuator in Parallel (LEAP) We aim to create a hopping mechanism for a small-scale, one-legged, untethered hopping robot. May 16, 2016IEEE International Conference on Robotics and Automation (ICRA)...
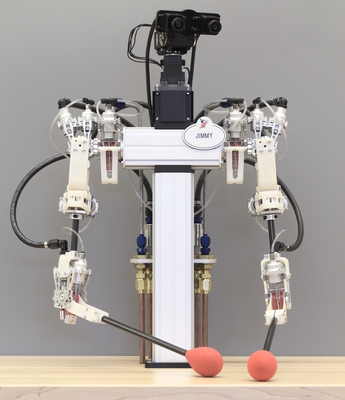
by Sarah Frigg | May 16, 2016 | Robotics
A Hybrid Hydrostatic Transmission and Human-Safe Haptic Telepresence Robot We present a new type of hydrostatic transmission that uses a hybrid air-water configuration. May 16, 2016IEEE International Conference on Robotics and Automation (ICRA) 2016 Authors...

by Martina Megaro | May 7, 2016 | Digital Fabrication, Visual Computing
DefSense: Computational Design of Customized Deformable Input Devices We present a novel optimization-based algorithm for the design and fabrication of customized, deformable input devices, capable of continuously sensing their deformation. May 7, 2016CHI...
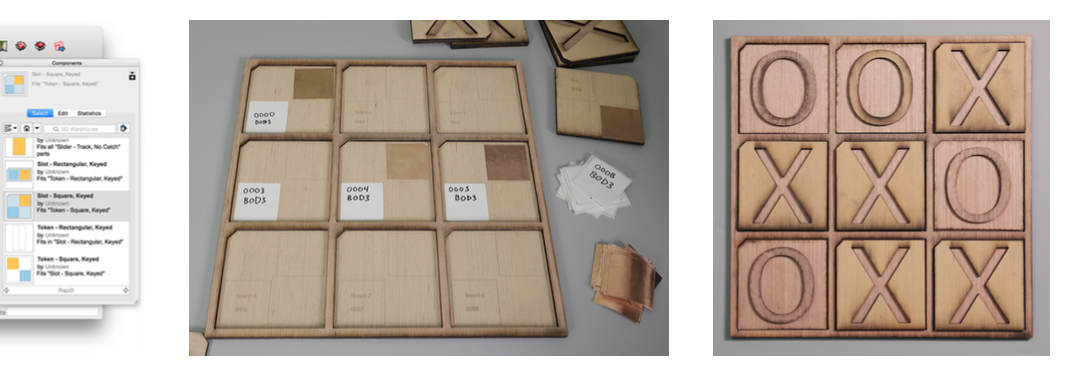
by Sarah Frigg | May 7, 2016 | Digital Fabrication, Uncategorized, Visual Computing
RapID: A Framework for Fabricating Low-Latency Interactive Objects with RFID Tags In this work, we show how to achieve low-latency manipulation and movement sensing with off-the-shelf RFID tags and readers. May 7, 2016CHI Interactivity 2016 Authors Andrew...