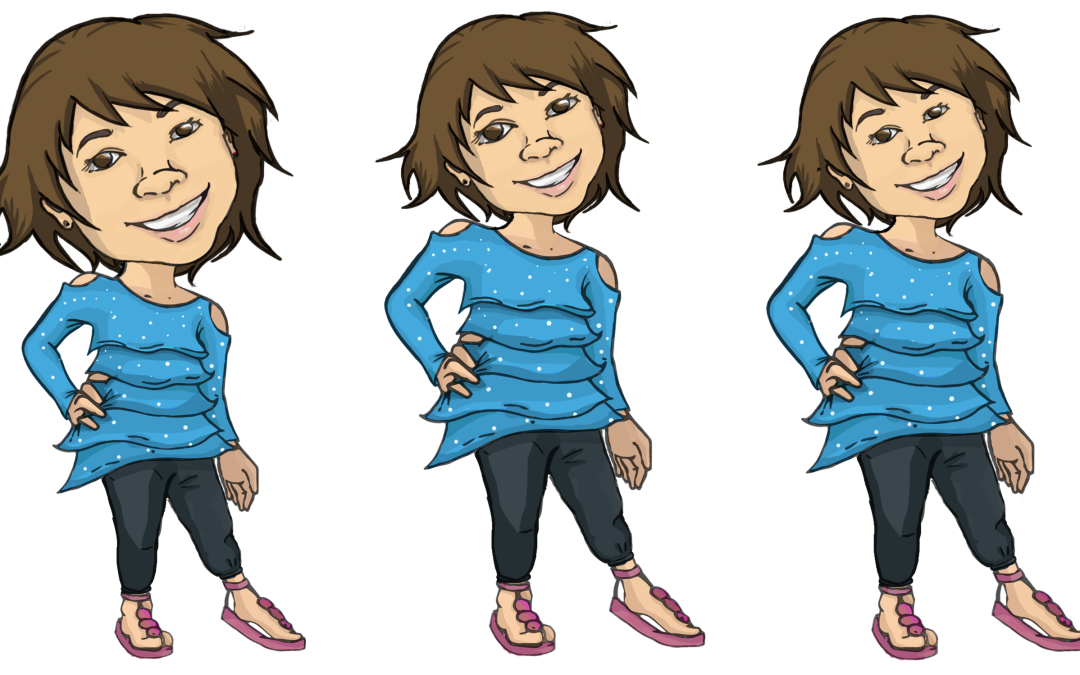
by Sarah Frigg | Jun 21, 2016 | Animation, Visual Computing
Designing Animated Characters for Children of Different Ages In order to examine the relationship between stylistic elements of animated characters and the target ages of their audiences, we performed a series of qualitative and quantitative studies. June 21,...

by Sarah Frigg | Jun 21, 2016 | Machine Learning, Robotics
The Robot Who Knew Too Much: Toward Understanding the Privacy/Personalization Trade-off in Child-Robot Conversation We explore what happens in the increasingly likely situation that a robot has sensed information about a child of which the child is unaware, then...
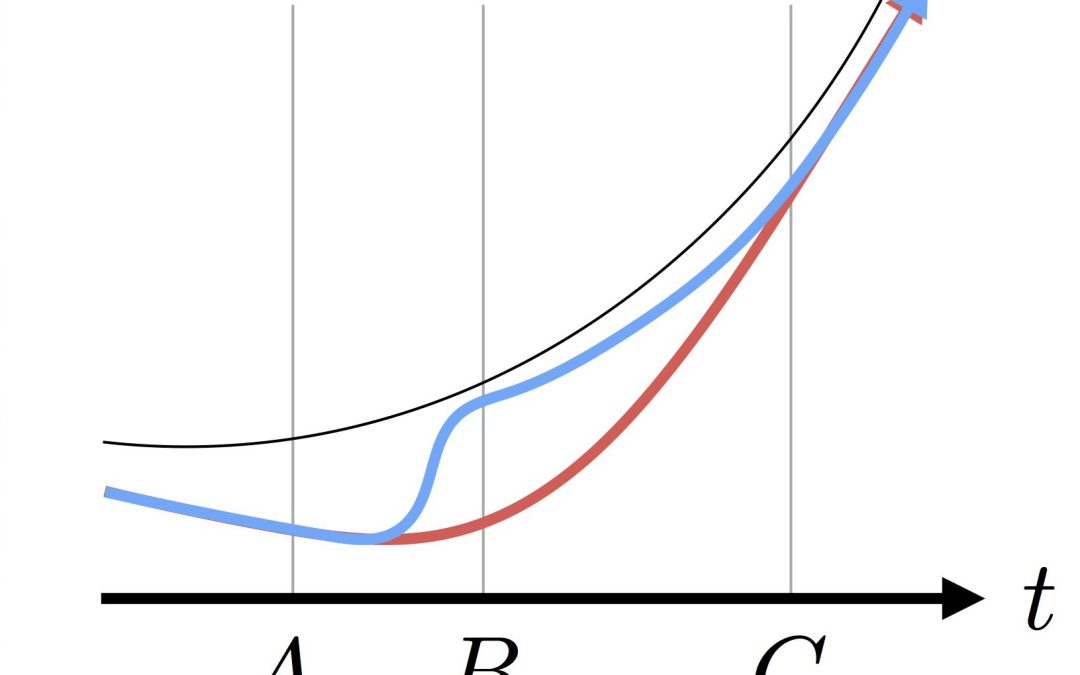
by Sarah Frigg | Jun 19, 2016 | Machine Learning, Visual Computing
Smooth Imitation Learning for Online Sequence Prediction We present an online learning meta-algorithm that achieves fast and stable convergence to a good policy. June 19, 2016International Conference on Machine Learning (ICML) 2016 Authors Hoang M. Le...
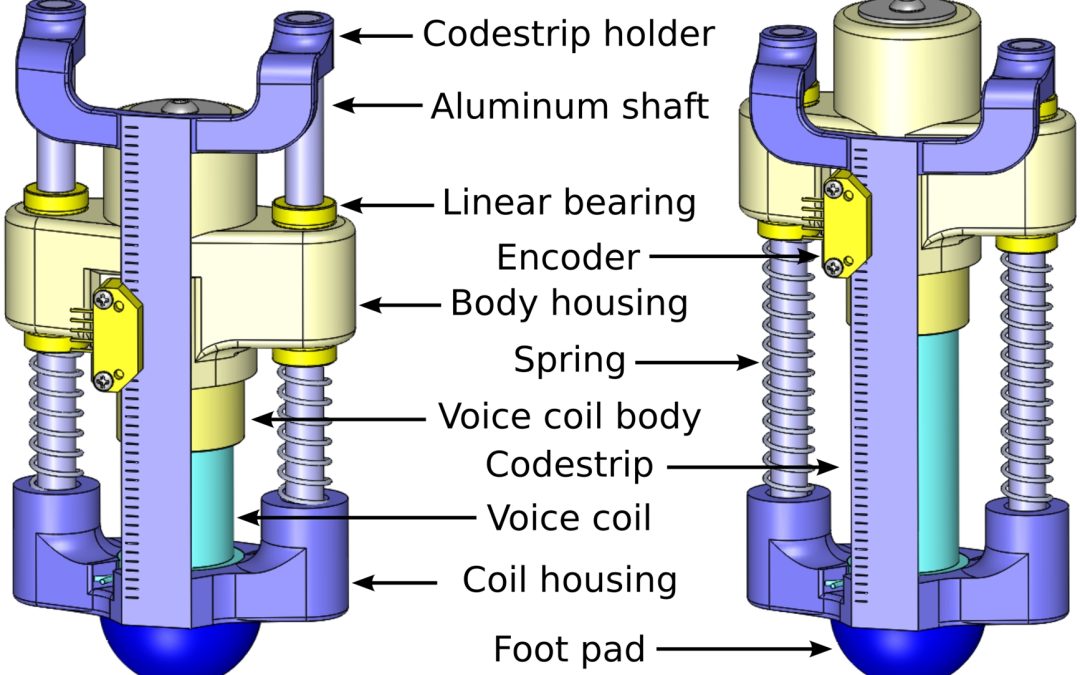
by Sarah Frigg | May 16, 2016 | Robotics
Design of a Hopping Mechanism Using a Voice Coil: Linear Elastic Actuator in Parallel (LEAP) We aim to create a hopping mechanism for a small-scale, one-legged, untethered hopping robot. May 16, 2016IEEE International Conference on Robotics and Automation (ICRA)...
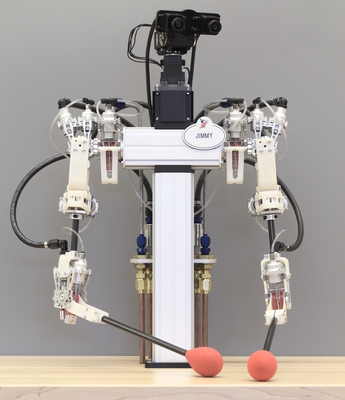
by Sarah Frigg | May 16, 2016 | Robotics
A Hybrid Hydrostatic Transmission and Human-Safe Haptic Telepresence Robot We present a new type of hydrostatic transmission that uses a hybrid air-water configuration. May 16, 2016IEEE International Conference on Robotics and Automation (ICRA) 2016 Authors...